Підйомник v3

Мета проекту
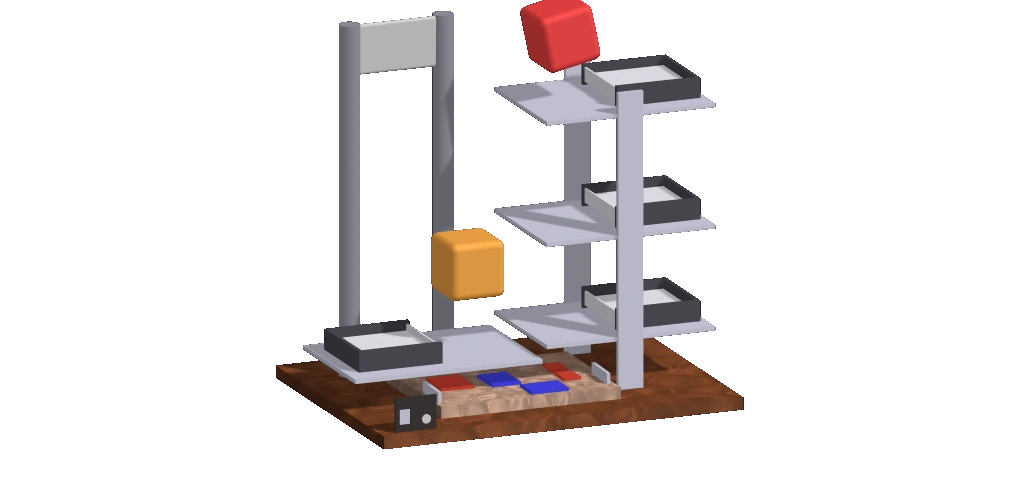
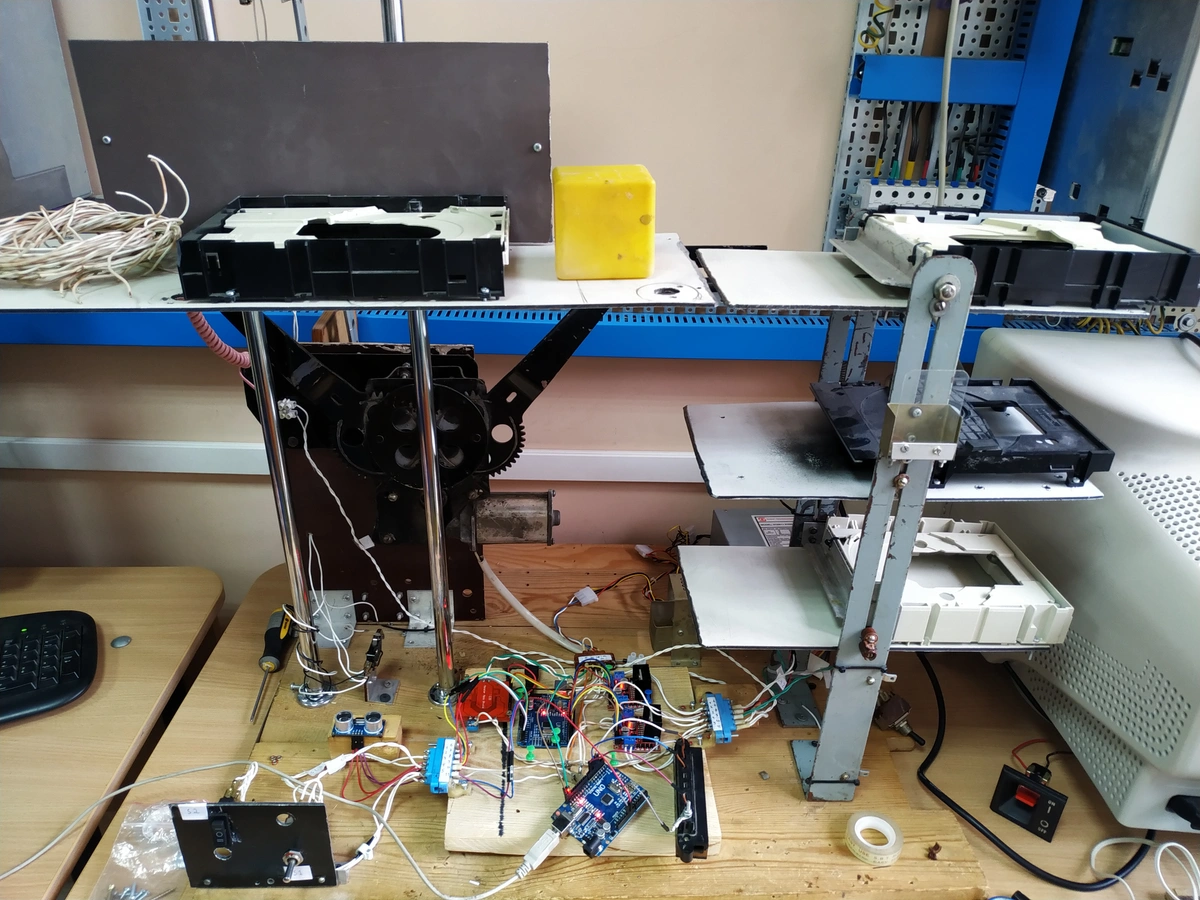
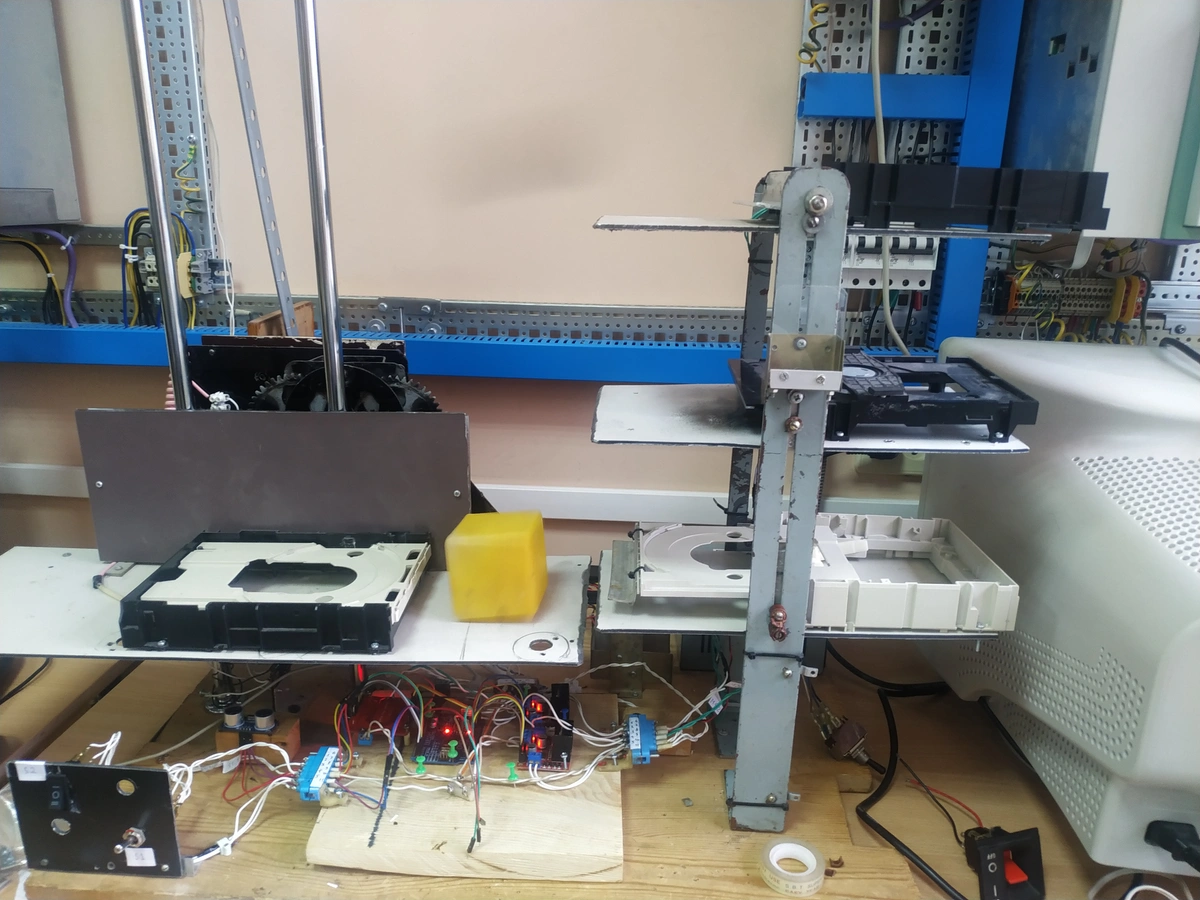
Стенд автоматичного підйомника представляє собою комплекс, що складається із платформи на основі механізму склопідйомнику та трьох поверхів зі штовхачами, поміж яких рухається платформа.
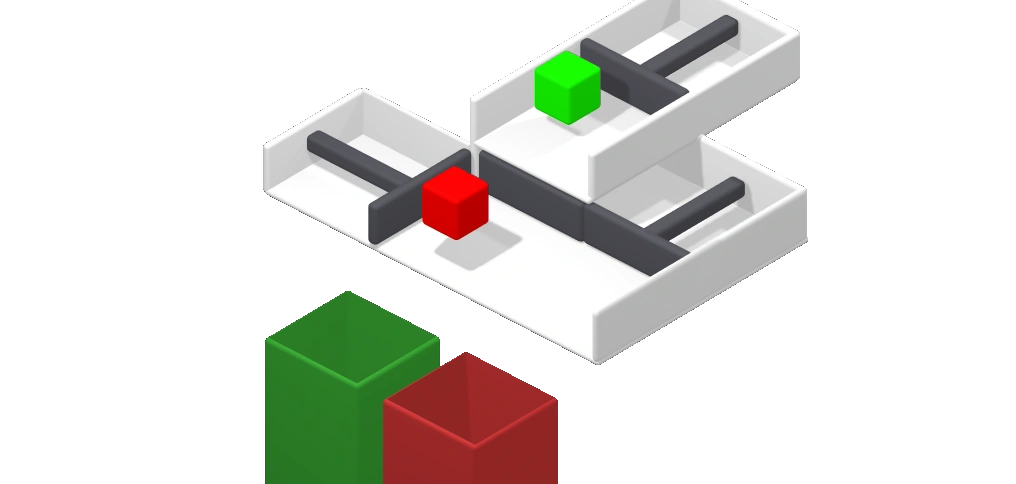
На платформі та на кожному з поверхів розташовані штовхачі — дисководи для товкання та переміщення грузу з платформи на поверх та назад.
Склопідйомник
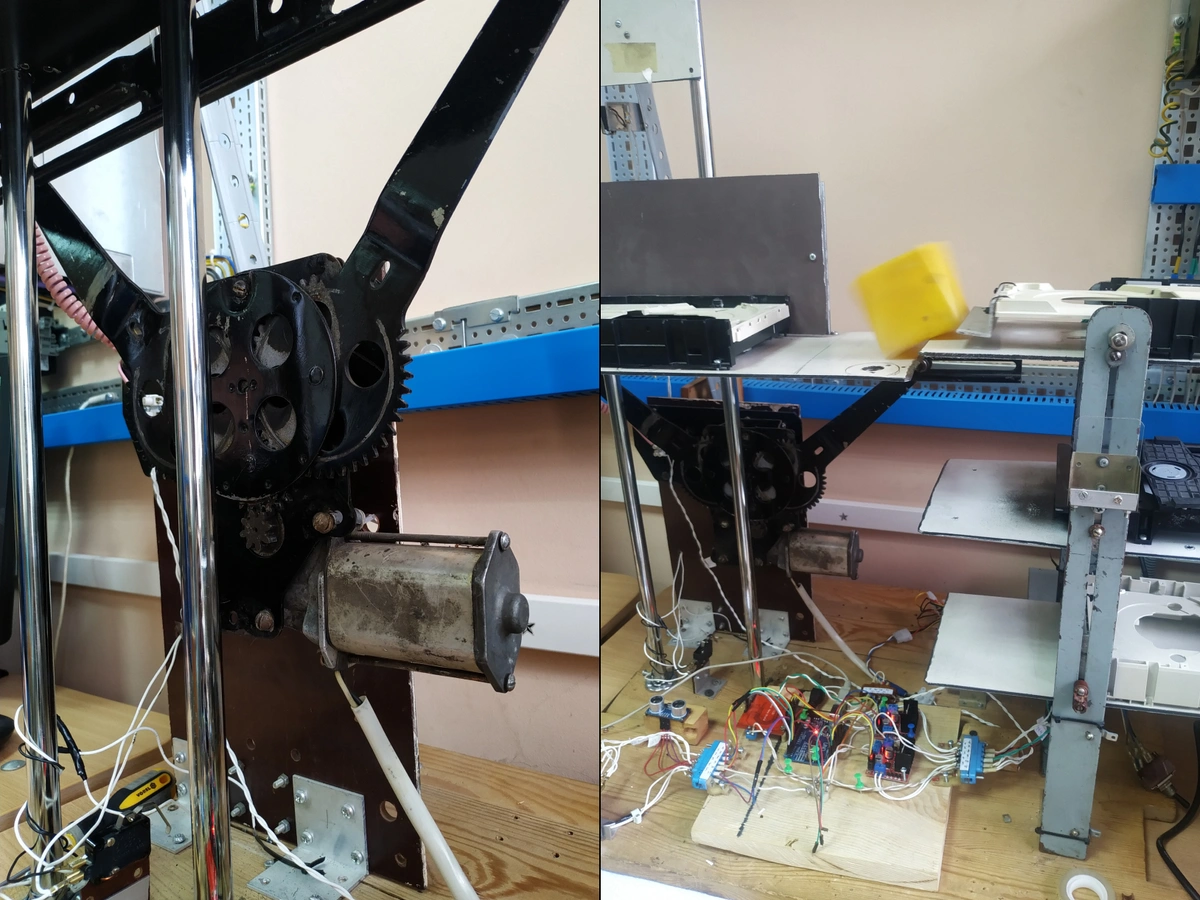
В основі стенду лежить склопідйомник з електроприводом на базі мотор-редуктору з двигуном постійного струму незалежного збудження. У конструкції склопідйомника використовується важільний механізм з двома робочими важелями.
Система керування
Автоматичним керуванням стенду піклується мікроконтролер Arduino UNO із запущеною на ньому програмою керування. Керування штовхачами на поверхах та на платформі здійснюється за допомогою двох драйверів L298, а керування двигуном платформи підйомника завдяки драйверу Monster Moto Shield.
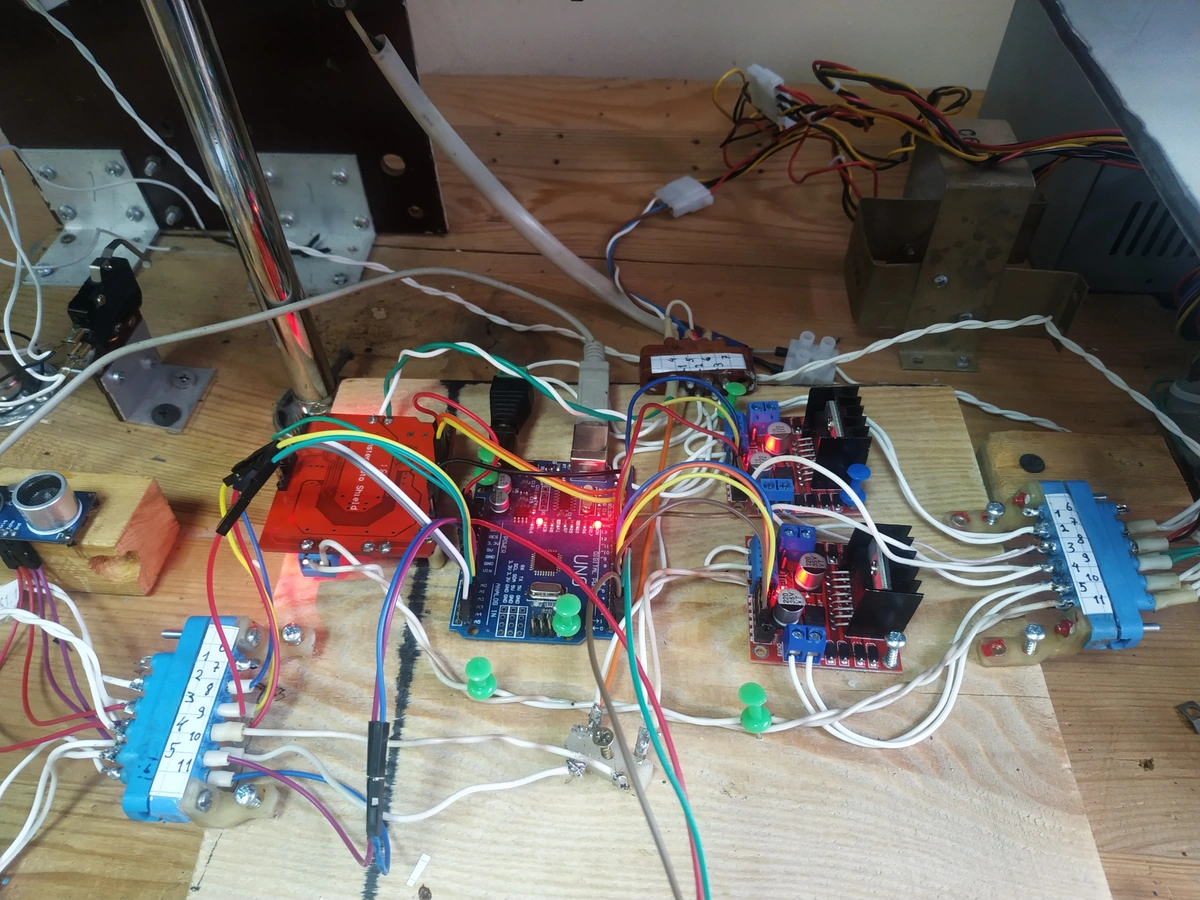
Вимірюванням поточної позиції платформи займається ультразвуковий датчик HC-SR04. Два кінцевих вимикача по краям осі переміщення платформи автоматично замикаються при їх досягненні платформою та вимикають двигун.
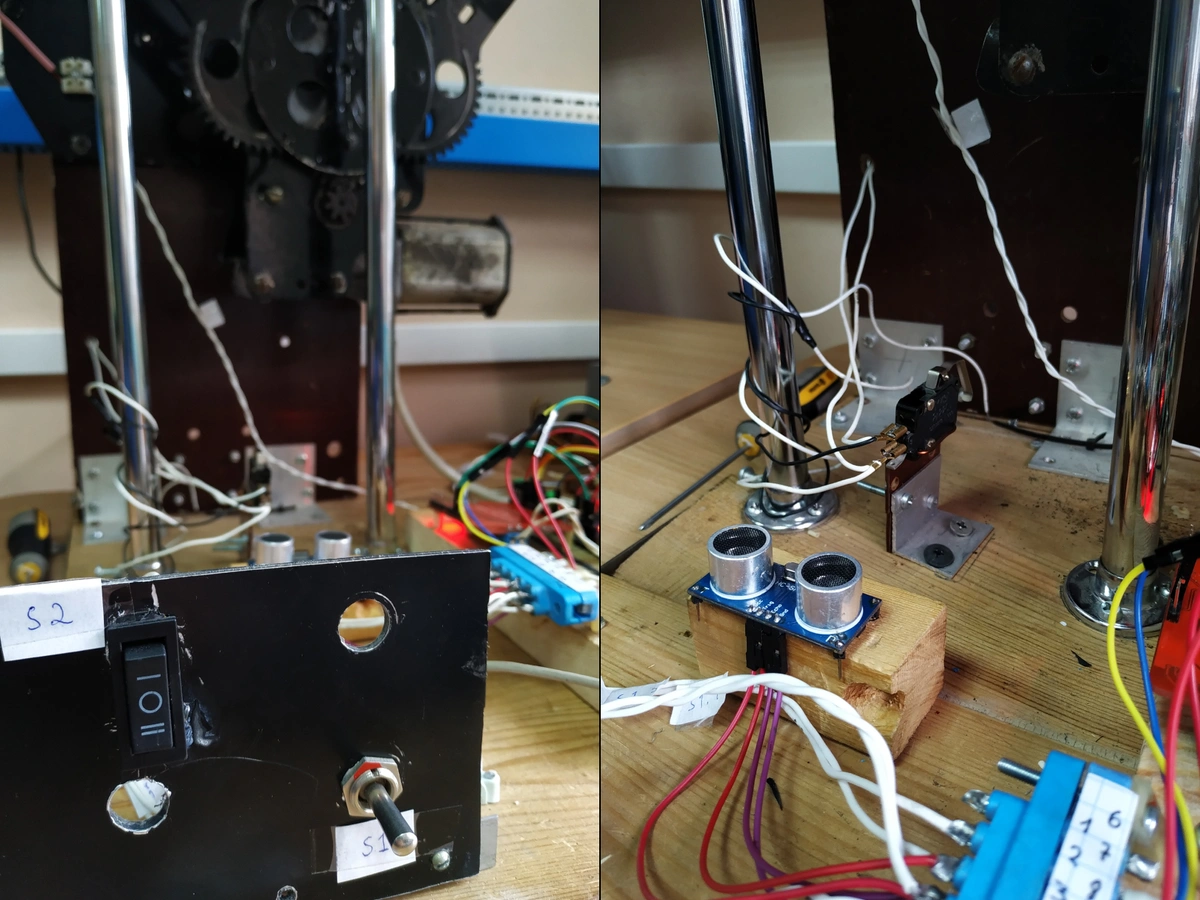
Стенд має два режими роботи – ручне керування та автоматичне переміщення. Керування обома режима роботи здійснюється за допомогою перемикачів, розташованих на окремій дошці.
 Перейти до 3D моделі проекту
Перейти до 3D моделі проектуМікропроцесорні платформи
Драйвери двигунів
Датчики
Мови програмування
Програмні технології
Засоби розробки
Джерело живлення
Механізми
Інтерактивна 3D модель