Зліт та падіння. Трагедія у трьох актах


Мета проекту
Створити робочу модель БПЛА, та виявити основні принципи побудови моделей такого класу
Акт 1: Початок усього
Нудьга – та ворожка, що виводить нас за межі буденності. Але хто б міг подумати, що саме цей час може стати маєтком для дійсно важливих або навіть фантастичних ідей.
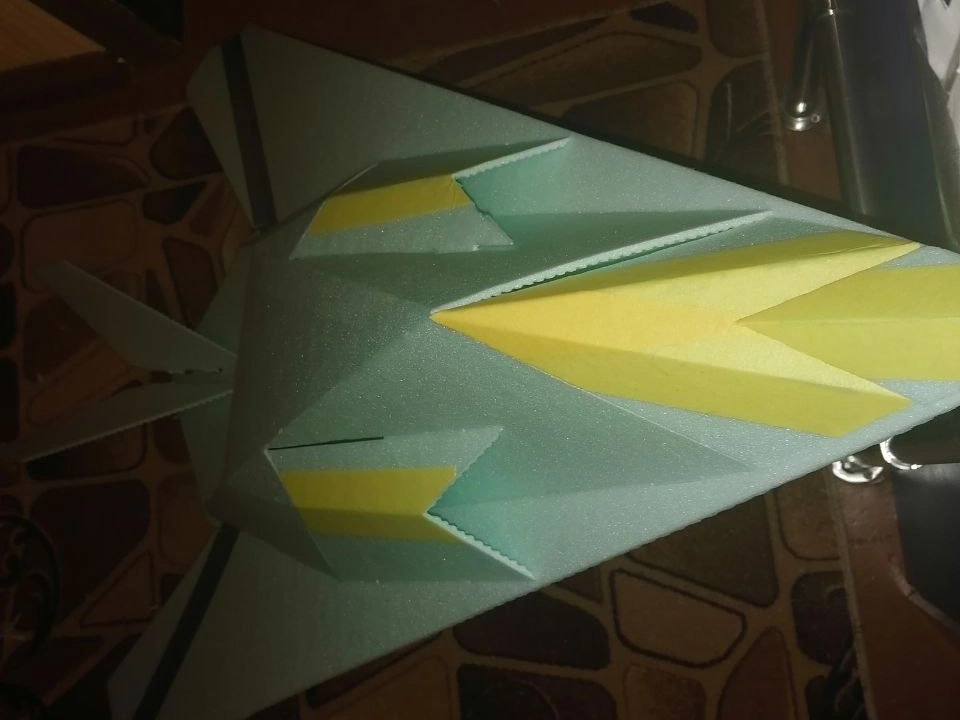
Проект розпочався, звісно ж, з ідеї, але однієї ідеї було недостатньо, щоб створити щось дійсно цінне. Тому першим етапом було створення моделі, яка зможе нести достатньо вантажу, щоб підняти в повітря всю електроніку. Досить проста в створенні, щоб її створення не зайняло занадто багато часу, і досить легка, щоб двигун зміг підняти її в повітря. Після тривалих пошуків в надрах Інтернету вибір пав на модель літака F-117.
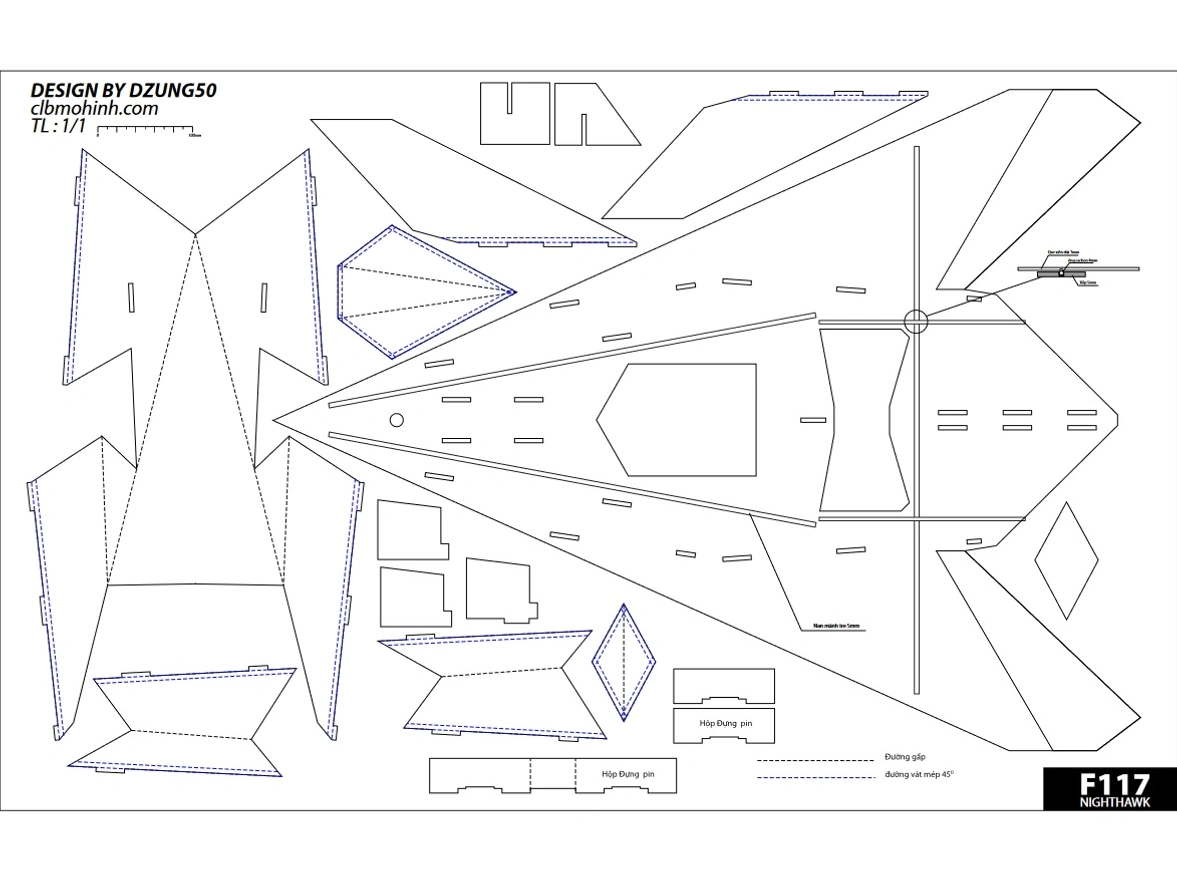
Також слід було обрати матеріал для виготовлення БПЛА. Після недовгого пошуку було обрано підложку під ламінат: тонкий, легкий матеріал, гнучкий, схожий за структурою на пінопласт або полістирол. Дуже великою перевагою була низька ціна і висока доступність. Проте, цей матеріал не був позбавлений недоліків. Тому, щоб позбавитися від низької жорсткості, конструкцію довелося подальшим кроком зміцнити дерев'яними рейками.
Акт 2: Народження
Наступним кроком після створення корпусу моделі, було обрання деталей і об'єднання їх в єдине ціле. Основними деталями були: BLDC мотор, регулятор ESC, Arduino Nano яка була в ролі польотного контролера, та nrf24l01 як радіоприймач, а в ролі живлення виступали акумулятори 18650 на 2900 mAh об'єднані по схемі 2S2P.
І ось, перед тим як світ побачить готове творіння, залишилися фінальні кроки: написання програм управління та комплексне тестування вже готового БПЛА.
Усього програм було три. Перша з них була написана на Python і відповідала за зчитування команд з керуючого пристрою (Старий комп'ютерний джойстик Logitech) та передачу цих команд через serial порт другій програмі. Вона ж в свою чергу читала ці команди і через nrf24l01 відправляла пакети даних далі. Третя програма була завантажена в Arduino Nano, яка виконувала роль польотного контролера. Її основною задачею було приймання даних з периферійних пристроїв і датчиків та видача команд управління на сервомотори та двигун. У проекті було достатньо місць, де можна було щось оптимізувати або покращити, але на той момент цього було достатньо. Моє творіння було готове побачити дивовижний світ!

Акт 3: Та смерть
Тестування, на жаль, виявило серйозні недоліки. Модель була практично некерованою. Причиною служили шуми, які виникали при роботі серводвигунів. У результаті зв'язок між модулями повністю втрачався. Рішення не найвишуканіше, але зате працююче: додати другий ланцюг живлення до Arduino, відокремивши її таким чином від серводвигунів. Були і інші помилки, але рішення знаходилися швидше.
За днями наполегливої праці і нескінченними дослідженнями настала довгоочікувана мить, коли все було готово до старту. Обладнання розгорнуто, закінчуються останні приготування. Сонце яскраво сяє високо на небі, а вітер шепоче в гілках дерев. Ніщо не передвіщало надходження біди... Ручка газу повільно починає рух, за нею чується наростаючий гул мотора. Літак зараз вже сам зірветься з рук. Час завмирає , товчок, і... Він летить! Летить! Висхідний потік вітру підхоплює його і несе в даль, але тут відбувається несподіване. Один із елевонів не витримує вітрового пориву і зриваючись зі свого положення утягує літак в штопор. Падіння. Удар. Важка батарея, що знаходилась в носі літака, з легкістю проламує тонкий і крихкий матеріал, не залишаючи шансу на повторний політ.











