Експертна система з серводвигунів


Мета проекту
Мета проекту — створення системи автоматизованого проектування (САПР), яка дозволяє вибирати сервоприводи на основі кількісних і якісних характеристик. Така система повинна включати базу даних моделей сервоприводів, базу знань правил проектування, систему прийняття рішень і кластеризацію на основі алгоритмів машинного навчання.
Класифікація та вибір сервоприводів
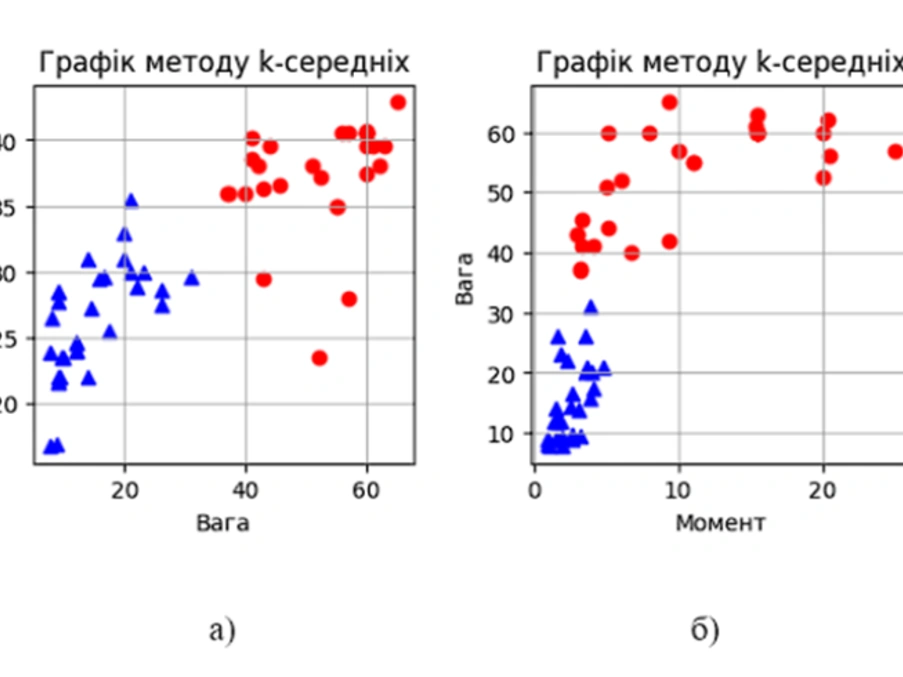
Вибір сервоприводу для робота залежить від багатьох факторів, таких як призначення робота, тип механізмів, системні вимоги і технічні параметри окремих підсистем. Наприклад, вимоги до надійності і вартості часто можуть бути суперечливими. Інші характеристики, такі як точність керування, можуть залежати від функціональних особливостей сервоприводу, наприклад, наявності вбудованого енкодера чи типу модуляції сигналу. Після проведення кластеризації, було отримано декілька кластерів. Кожен отриманий кластер має свої унікальні властивості та характеристики, які визначаються взаємним розташуванням об'єктів у просторі даних. При описі отриманих кластерів за методом к-середніх, важливо вказати їхні центри, розміри, характеристики об'єктів у межах кожного кластера та можливі відмінності між ними. Отримані кластери можуть бути використані для подальшого аналізу даних, виявлення закономірностей. Приклад таких кластерів наведено на рисунку.
Приклад вибору сервоприводу
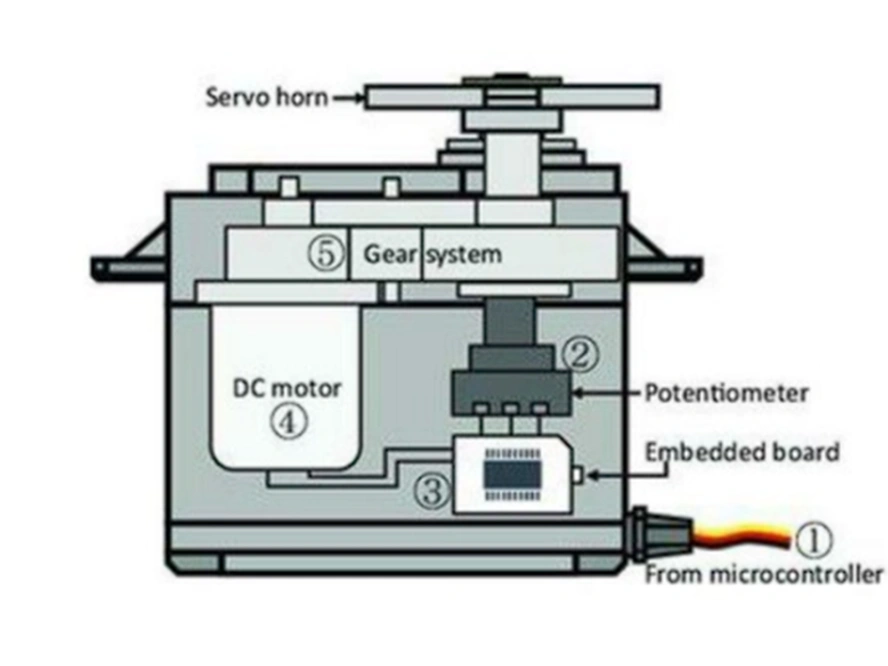
Як приклад, можна взяти сервопривід SG90, який має низьку якість виготовлення і середні робочі характеристики. Цей сервопривід часто виходить з ладу через низьку якість редуктора з пластмаси, але є популярним завдяки своїй низькій ціні.
Система автоматизованого проектування (САПР)
Для роботи САПР необхідно сформувати базу знань, яка містить умови та вимоги для вибору сервоприводів. База знань може бути представлена у вигляді дерева рішень або продукційних правил. Наприклад, правило "вимога (надійність) → двигун (безколекторний)". Такий підхід дозволяє автоматично вибирати моделі сервоприводів відповідно до вимог проекту.
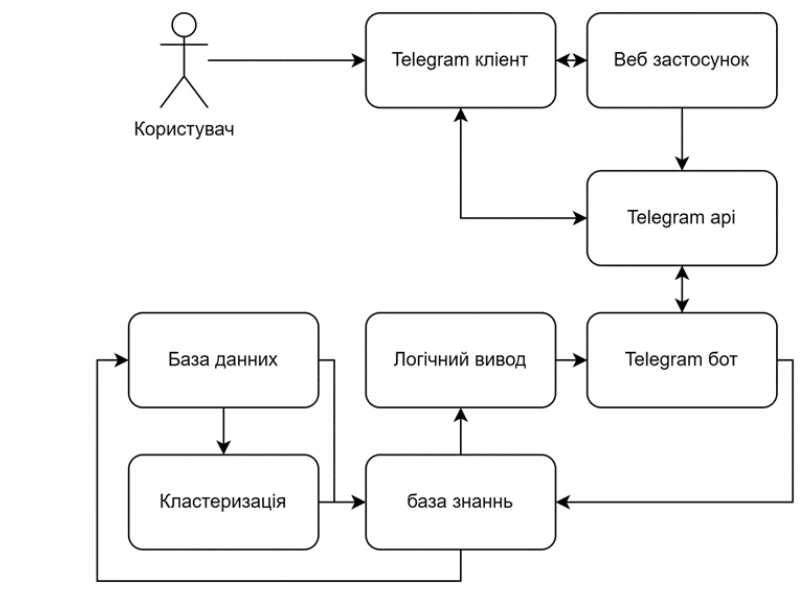
Система взаємодіє через інтерфейс користувача, реалізований у вигляді Telegram-бота. Користувач вводить запити через бот, який передає їх на сервер для обробки за допомогою алгоритмів логічного висновку і кластеризації.
Приклад використання САПР на роботі гексаподі
Для перевірки роботи САПР було розроблено робот-гексапод — механічну платформу з шістьма ногами для пересування. Це дозволяє не тільки тестувати теорії пересування, а й оцінювати характеристики вибору сервоприводів. Робот оснащений 18 сервоприводами MG995, які були вибрані на основі таких запитів до САПР:
- Вимога до надійності.
- Вимога до великого моменту.
- Вимога до низького споживаного струму.
Ці вимоги були обумовлені великими розмірами робота (довжина 34 см, ширина 22 см) і використанням фанери 3 мм для виготовлення конструкції. Всі деталі були вирізані за допомогою лазерного ЧПК.

Результати
Аналіз результатів роботи САПР показав, що зміна вимог до системи (наприклад, підвищення вимог до надійності чи моменту) може значно змінити вибір сервоприводів для проекту. САПР дозволяє значно скоротити час на вибір компонентів, зменшуючи простір можливих рішень на ранніх етапах проекту.
Висновок
У результаті проекту було розроблено нову методологію вибору сервоприводів, яка ґрунтується на системних вимогах, а не тільки на точних числових характеристиках. Створена система автоматизованого проектування включає базу знань, систему кластеризації та інтерфейс користувача для зручної взаємодії. Перевірка системи на практичних прикладах показала її ефективність для проектування роботів і безпілотних літальних апаратів.










