Електропривод БПЛА літакового типу

Мета проекту
Метою проекту було спроектувати електропривод для БПЛА літакового типу, та побудувати повнорозмірний прототип
БПЛА поділяються на кілька основних категорій, залежно від їх характеристик і призначення, тому першочергово нам слід визначитися з напрямком нашої розробки.

Класична схема або нормальна аеродинамічна схема є найбільш поширеною серед літальних апаратів, включаючи БПЛА літакового типу. Вона характеризується наявністю основного крила, розташованого ближче до середини або передньої частини фюзеляжу, та хвостового оперення, розташованого позаду основного крила. Літальні апарати побудовані за такою схемою найбільш розповсюджені, а отже і інформації для створення такого БПЛА в мережі достатньо, саме тому було вирішено взяти за основу класичну схему.
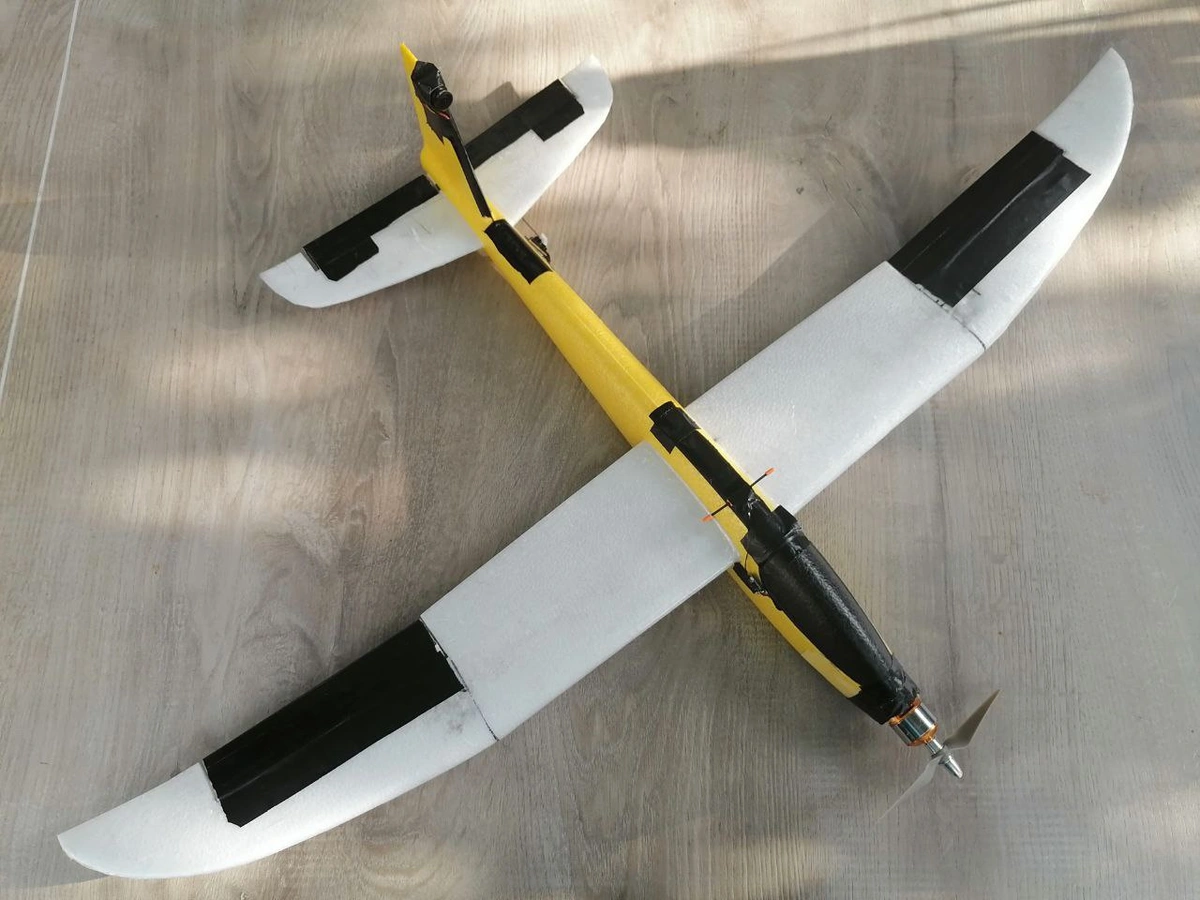
Наш БПЛА буде збиратися на основі метального планера з EPP (спінений поліпропілен), що має розмахом крил 1 м.

Після того як ми впевнилися, що усі компоненти працюють, ми перейшли до етапу складання БПЛА. В планері, в місцях де мала розташовуватись електроніка були зроблені комірки, увесь зайвий матеріал був вирізаний після чого в комірки були встановлені відповідні елементи.

де
- 1) радіоприймач;
- 2) польотний контролер;
- 3) регулятор швидкості;
- 4) двигун;
- 5) пропелер;
- 6) серводвигун елеронів;
- 7) серводвигун руля висоти;
- 8) GPS-приймач;
- 9) камера;
- 10) відеопередавач.
Заключним етапом проєктування було проведення тестового польоту для перевірки коректності виконаної роботи по підбору комплектуючих. Фото польоту зроблене бортовою камерою, що була закріплена на хвості БПЛА можна побачити на рисунку:

Як видно з фото БПЛА піднявся в повітря та досяг швидкості в 32 км/год після чого успішно приземлився. Досягнення швидкості 32 км/год було підтверджено показниками бортового GPS-модуля. Під час випробувань БПЛА продемонстрував стабільний політ без значних відхилень від заданого курсу, що свідчить про надійну роботу системи автопілота та ефективність аеродинамічного дизайну










